現場導入への道筋を設ける
――具体的な制度はあるのですか
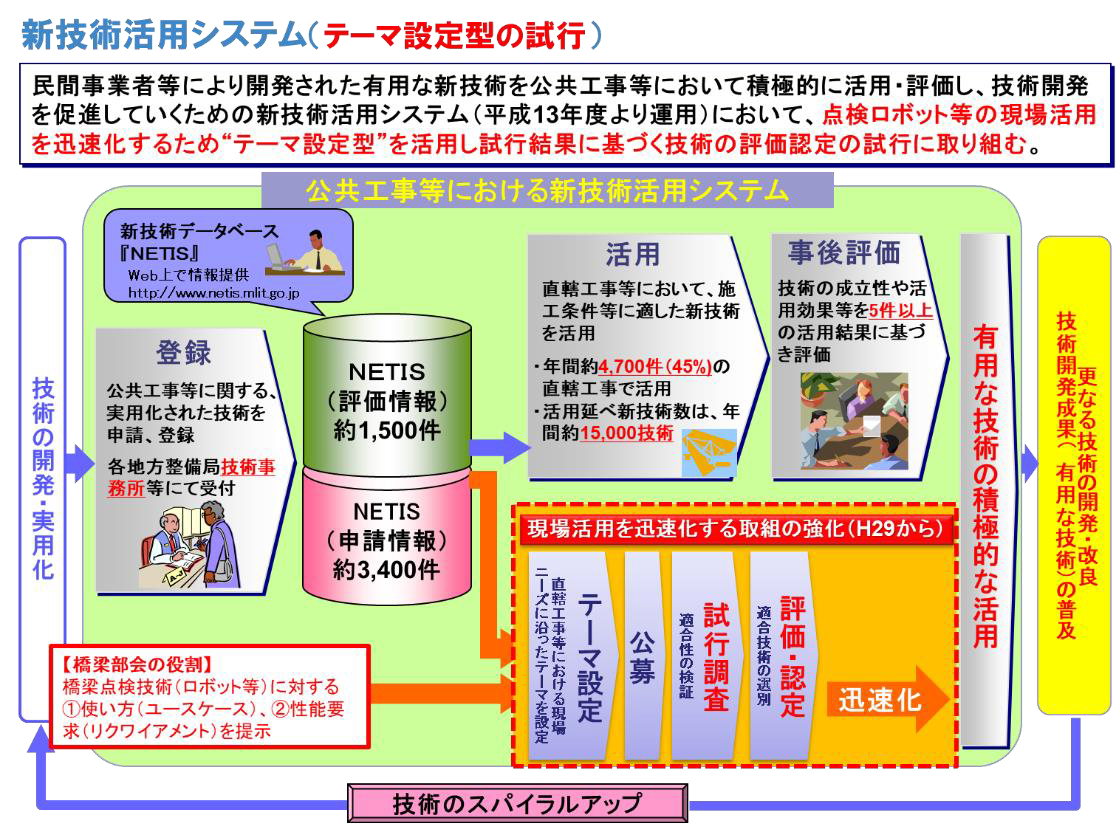
新田 道路橋点検記録作成支援ロボット技術の要求性能(案)に基づいて検証が行われることにより現場導入への道筋(「新技術活用制度」の改良スキーム)が設けられました。
この図では、検証で優れた技術と評価されたもの、例えば、先程のJシステムのようなものについて、その後発類似技術にきちんと門戸を開くためインフラ社会ロボット現場検証委員会、SIPの研究成果、その現場検証などを踏まえて評価手法や項目、ひいてはリクワイメント(要求性能)を明確化しました(下図参照)。このリクワイメントを用いて、後発類似技術に対し新技術活用システム(テーマ設定型(認定タイプ(H29~))の試行を始めました。NETISを用いて点検ロボット等の現場活用を迅速化するため“テーマ設定型”を活用し試行結果に基づく技術の評価認定の試行に取り組むものです。研究成果や懸賞のノウハウをそのまま公募条件にして、はじめは九州地整で実際に実施されました。
公募して、応募してもらった技術の技術評価を行い、最後に比較表を作ろうと。その評価が終わったら発注手続きをしなくてはいけないわけですが、ここである程度性能評価ができたら、業務契約書を作り、発注手続き書を作って、少し先導的導入を各務原市が行った各務原大橋のような形で使い、本格的な発注手続書を作って本格的な普及につなげていきたいと考えています。歩掛調査もしてちゃんとビジネスになるようにしていきたいのです。
また、SIPインフラでは、SIPで開発された点検ロボット技術についても現場検証が必要なものは、国交省の現場検証に入れてリクワイメント設定し評価がなされました。、導入可能な技術はSIP成果をダイレクトに導入する道も作ろうとしていました。この仕組みは、最初の案を作ったときは(推薦ではなく)認定と書いているわけですが、実際認定することは難しくできなかった。それは、同じ技術でも使いかたによって性能が変わってきてしまうためです。
カタログ方式を明示
点検画像を3次元で蓄積し、ビューワーで確認する仕組みも
――それは確かにそうですね
新田 それで今、カタログ方式という手法が定められました。カタログスペックに掲載する項目は国が決めます。決められた項目に従ってメーカーはちゃんと数値などを入力して、メーカーの責任で公表するわけです。そうするとカタログを見ながら点検するコンサルタントも導入を考えるし、国交省や自治体もそれを認めることができます。こういう動きを今作っています。
今回の橋梁定期点検要領の改訂というのは、合理化と新技術活用が柱ですが、その思想をロボット点検技術の導入に生かすため、フィールド試行の中で先行的導入の仕様とカタログの記載要領を考えています。活用の流れとしては受注者とメーカーと発注者の中で点検技術・支援技術使用計画書を提出し、発注者が受理すると、それはカタログ性能値と活用場面を明らかにして技術選定理由を説明してもらい、実際に点検するものです。
点検し終わったらその成果物を提出してもらいますが、そこで土研では点検画像を3次元で蓄積し、ビューワで確認する仕組みを提案したいと考えています。
――3次元のビューワについて、もう少し具体的に
新田 以前は、全面的にロボットによるスクリーニングが実現したら点検コストを30%くらいは縮減できるのではないかと思っていました。しかし実際やってみると、かえってデータ処理に要する手間やコストが増える傾向が見えてきました。現場の点検経費や足場費用などが安くなってもデータ処理コストが増大するのです。
今の調書は平面図に引き出し線というものを引っ張って、そこにコメントします(下図)。これが膨大な作業なのです。写真1点、1点にコメントを入れているような状況です。ロボット撮影する画像は、1000~2000枚と増えてしまいますので、全ての画像に人手をかけると当然コストは増えます。しかも写真一枚一枚見てもどこをどの方向から撮影したかはわからない。私が現場で出張所長をやっていた時もそうでしたが、報告書の写真から実際の損傷を確認することは容易ではありません。この辺の効率化をやらないとロボット点検技術は普及できないと思いました。
そのため3次元ビューワーを用いた納入要領を提案したいと考えています。点検ロボット導入の流れに合わせてやらないといけません。
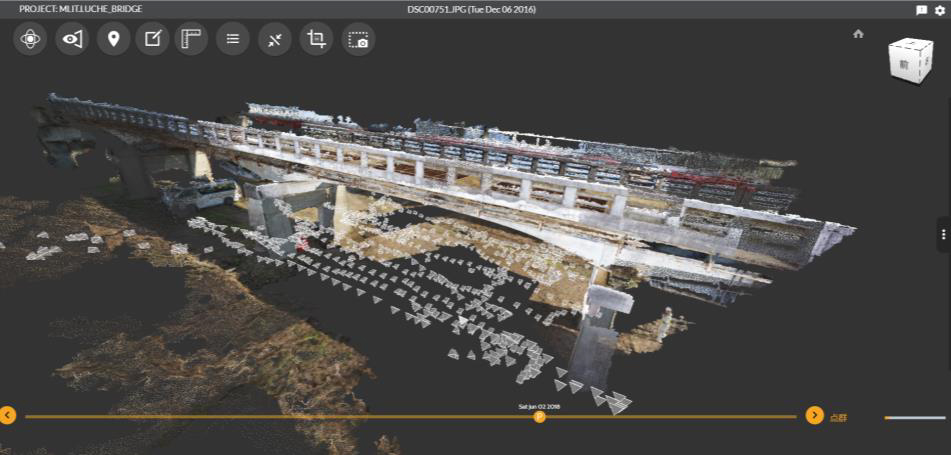
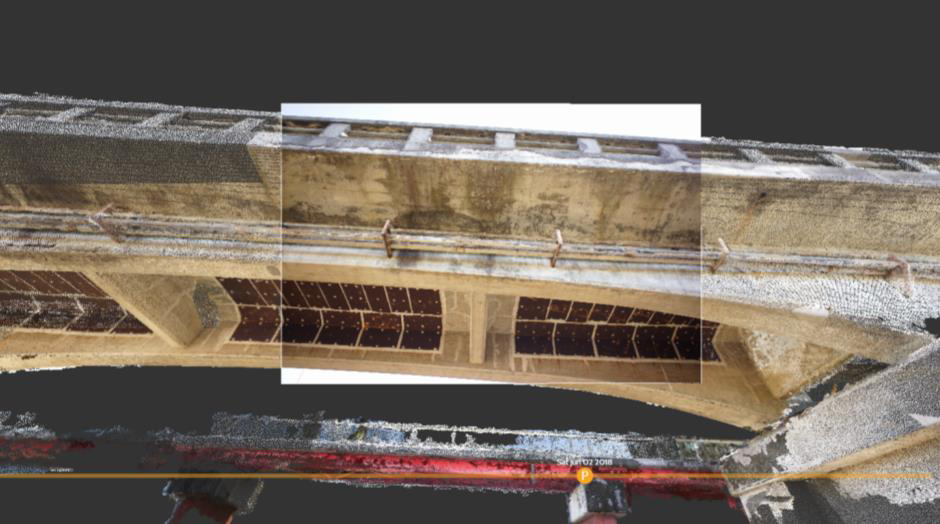
3次元ビューワー画像例
――いわば結構前から望まれていた3D橋梁台帳ですね。しかし、データの膨大さがネックになっていました
新田 3D橋梁台帳に期待する所は、画像を自動整理でできるところです。
画像に対してあらかじめ位置情報と方向(ベクトル)情報を付与することで、その画像の部位を自動的に正確に配置できます。将来的にはAIの教師データを深化させることで自動的に入力、損傷区分の判別ができることを見込んでいます。ただし損傷状況に対する詳細なコメントは、技術者の判断が必要ですから、人為的に入力することが必要です。
できた3D橋梁台帳は、様々な角度から構造物を見ることができ、しかもいちいち調べなくてもマウスカーソルを当てることで詳細な写真及び損傷状況、詳細なコメントを得ることができます。また撮影部位や方向も座標として固定できますので、時系列的な経年劣化もより詳細かつ正確に測定し、3次元橋梁台帳に紐づけすることができます。ある意味3次元ではなく4次元以上の橋梁台帳といえますね。
撮影を正確に行うために橋梁に対してマーカーを付けることも提案しています。例えばドローン調査の飛行状況によっては主桁1本1本を撮影するために主桁間の距離補正がうまくいかないことがあるのですが、マーカーで補正が容易になります。
最終的にはこれらを自治体でも活用頂きたいと思います。こうした下地ができてこそロボット点検技術における写真撮影に意味が出てきます。さらに効率化できればほとんどの部分をAIに託すことも可能になってくるでしょう。特に斜め撮影したデータは正対して撮影したものとは異なり、幅などを計測する場合に補正が必要です。これも撮影量を増やし学習してAIが自動補正できるようになれば飛躍的に効率化できます。ここまで全部できて、ロボット点検技術は、ビジネスとして成立すると思います。
――異常箇所はどのように記録されるのかもう少し詳しく
新田 例えば3D橋梁台帳の中で、異常のある部分を赤く表示して、そこに損傷ランクやデータはもちろん、コメントを詳しく書くというようなことを考えています。
我々の次の世代は、相当なインフラ老朽化社会の中で生きていかなくてはなりません。そこでは従来のようなやり方では通用しません。それに「損傷がなかった」というのも立派な情報です。それを残すのも時代の責務だと思います。それをやる仕組みを提案し、ビジネスに乗っかるようにしたい。建設作業に投資マネーが集まるようにしたいと考えています。
AIには作業の自動化はもちろん、判断の自動化も期待しています。もっとも、AIが診断のような技術者の判断まで代行するとは思えませんが、単に撮影した(しようとしている)箇所にひびがあるか否かという単純な判断はできると考えています。
今回点検要領では、状態の把握と健全性の診断が明確になりました。これがロボットなど新たな点検技術の導入もし易くなったのではないかと思います。
効果的なメンテナンスサイクルの実現につなげていきたい
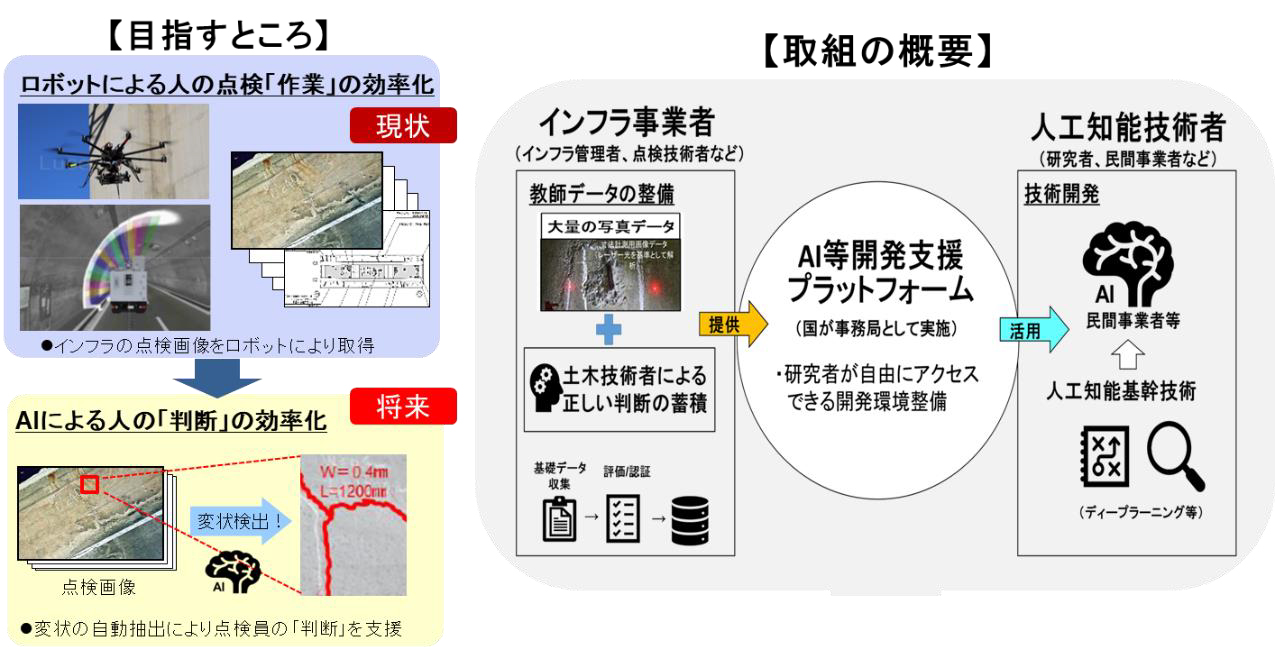
最後に、点検画像から損傷を読み取ることはディープラーニングAIの活用が可能な分野です。しかし、損傷を見つけるといった比較的単純な判断であっても、自動化するためには、「教師データ」を作る必要があります。テスト問題を出して、どれぐらいの正解率かというのをきちんと確認された環境を国交省や研究機関が率先して作る必要があります。先進的な技術ですが、AIやロボット技術者だけで開発することはできません。土木分野の専門家の知見を集約するとともに、評価項目や要求性能については国だけでなく、学識者や民間企業が知恵を出し合って取り組んでいくことが必要です。
きちんとオーソライズしていかないといけません。
そして、効果的なメンテンナンスサイクルの実現に繋げていければ、と考えています。
――ありがとうございました
(2019年4月15日掲載予定)
【関連記事】
岐阜大学SIP ロボット点検技術を橋梁点検にどのように生かすか
【オピニオン】回転寿司に学ぶ、インフラ維持管理における最適解。
国交省 新道路橋定期点検要領の重要改定点とその狙い