六郷教授 今後は近接目視を絞り込むスクリーニングに使える
岐阜大学SIP ロボット点検技術を橋梁点検にどのように生かすか

岐阜大学工学部
社会基盤工学科
名誉教授
特任教授
六郷 恵哲 氏
各務原大橋を用いてロボット点検技術を実橋に使うなど、意欲的な岐阜大学を中心としたSIPがこのほど終了した。①ロボット技術による事前調査の結果を踏まえて重点的に近接目視を実施、②ロボット技術の評価方法を含む指針(案)を作成、③ロボット技術の性能を評価し、複数の技術を組合せて適用--といった内容にそって実橋での適用がなされ大きな成果を挙げた。改訂された橋梁定期点検要領下での同技術の運用について、同SIPで中心となった岐阜大学の六郷恵哲特任教授に詳細を聞いた。(井手迫瑞樹)
各務原大橋を用いた実橋点検
課題の突破口となったSIP
――各務原大橋を用いた実装実験を行うに至った経緯と、実験の内容、それに用いたドローンなど足場を伴わない非破壊点検技術の概要から教えてください
六郷教授 内閣府主導のSIP「戦略的イノベーション創造プログラム」の中に、「インフラ維持管理・更新・マネジメント技術」の分野(SIPインフラ)があり、2014年度から5年間、維持管理技術の研究開発が活発に行われました。その中で地方自治体等におけるSIP維持管理技術の利用、すなわち社会実装を促すために追加公募が行われ、岐阜大学の研究プロジェクト等が2016年8月末に採択されました。
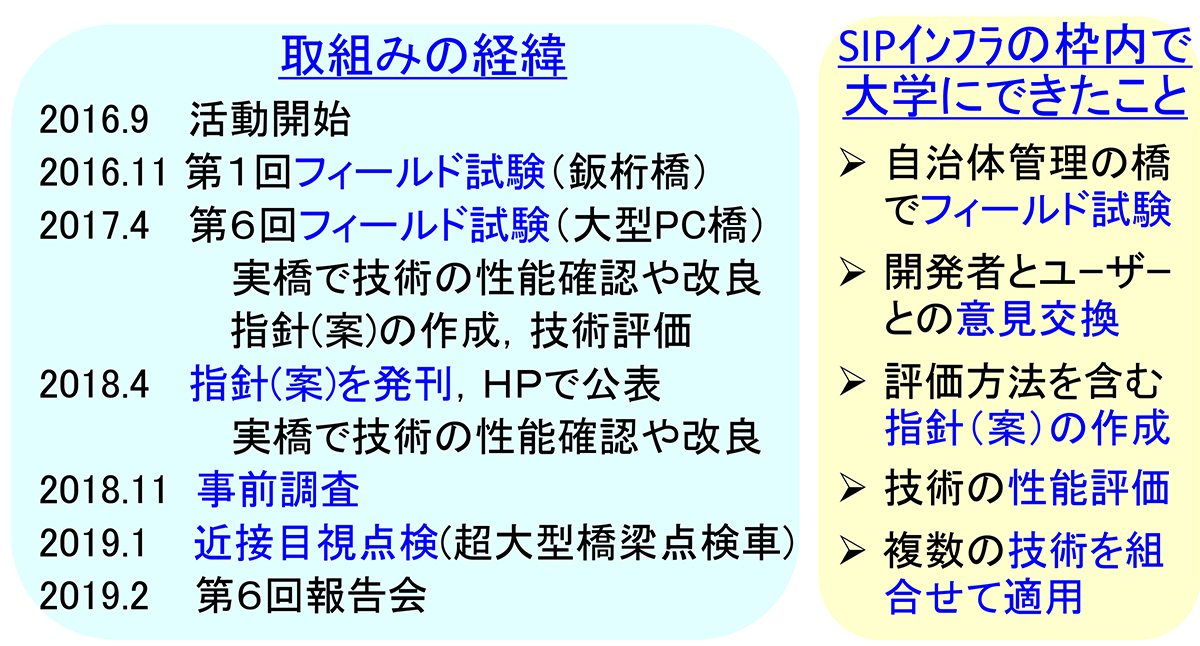
取り組みの経緯
岐阜大学チームでは、2016年11月~2017年4月にかけて、SIP維持管理技術に関する説明会やフィールド試験や講演会等を行い、技術の開発者からの説明や意見交換を通じて、参加者に技術の内容を伝えるとともに、技術開発者の方々には、地域からのニーズを伝えました。また、維持管理に関する様々な新技術が使われにくい理由を関係者へのヒヤリング等で調査し、対策を一緒に考え、提案しました。
当時から、橋梁点検用のロボット技術として有力なものが開発されていましたが、道路橋の定期点検要領(平成26年度版)では「近接目視」を行うことが規定されているため、橋梁点検用のロボット技術を活用できない状態でした。
そうした中で、自歩道幅が広く大型点検車での点検ができない各務原大橋を管理する各務原市の担当者が、吊り足場による点検など、従来の方法では点検費用が掛かりすぎるために困っておられました。自治体でもこれだけの大きさを有している橋梁はなく、非常に苦労されていました。

各務原大橋
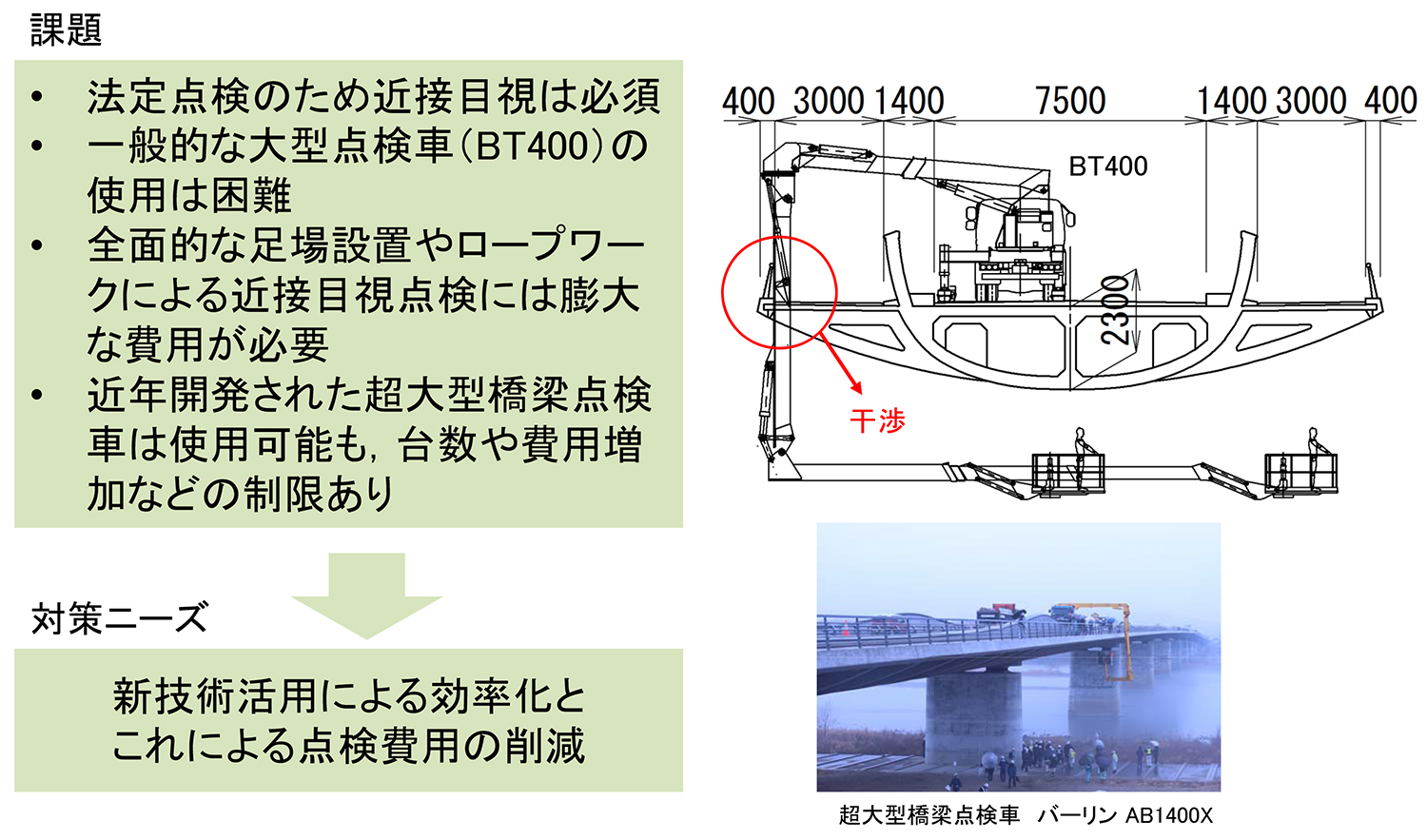
各務原大橋の点検における課題
以上のことを背景として、各務原大橋の定期点検へのロボット点検技術の取入れの活動を行うことになりました。全国でもロボット点検技術を活用して橋梁の定期点検を行っているのは現状ではこの橋梁だけです。
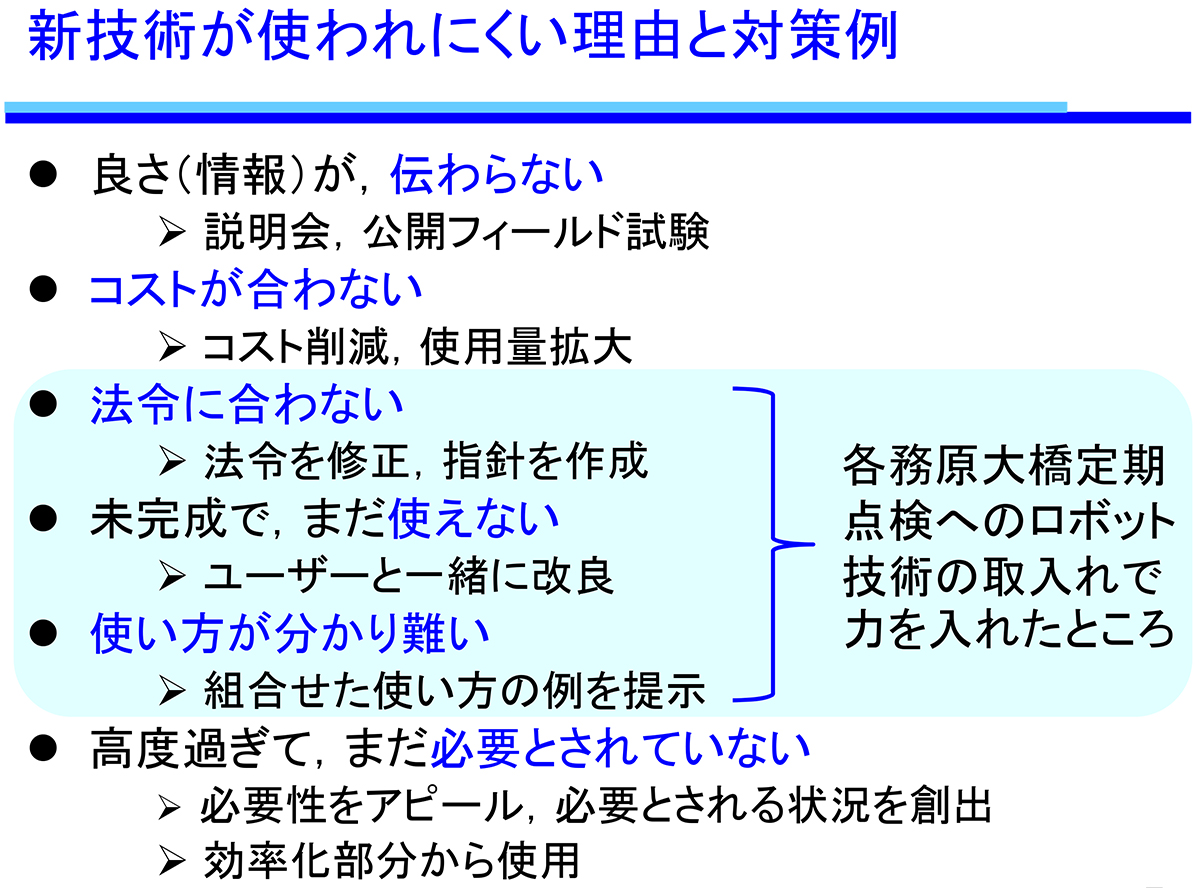 新技術が使われない理由として、「良さ(情報)が伝わらない」「コストが合わない」「法令に合わない」「未完成で、まだ使えない」「使い方が分かり難い」「高度過ぎて、まだ必要とされていない」などがありますが、橋梁点検用ロボット技術については、「法令に合わない」「未完成で、まだ使えない」「使い方が分かり難い」とう理由が主なものでしたので、地域実装活動として取り上げるのに適していました。
新技術が使われない理由として、「良さ(情報)が伝わらない」「コストが合わない」「法令に合わない」「未完成で、まだ使えない」「使い方が分かり難い」「高度過ぎて、まだ必要とされていない」などがありますが、橋梁点検用ロボット技術については、「法令に合わない」「未完成で、まだ使えない」「使い方が分かり難い」とう理由が主なものでしたので、地域実装活動として取り上げるのに適していました。
――国が浜松などで行ったドローンなどを用いた実装実験では、風などによってそもそも飛ばないこともありました。なかなか橋梁点検に使うのは難しいと感じましたが
六郷 しかし、諦めずに使おうと思いました。使わなければ、結局技術は進まず実装できません。課題としての人手不足は待ってくれないのですから、ロボット点検技術を進めなければ課題は解決できません。その突破口となったのが本SIPインフラの活動です。
――具体的に各務原大橋ではどのような実装試験を行ったのですか?
六郷 岐阜大学チームでは、平成26年度版の点検要領のもとで、2018(平成30)年度に、ロボット技術を取り入れた各務原大橋の定期点検を実施しました。具体的には①ロボット技術による事前調査の結果を踏まえて重点的に近接目視を実施、②ロボット技術の評価方法を含む指針(案)を作成、③ロボット技術の性能を評価し、複数の技術を組合せて適用というものです。
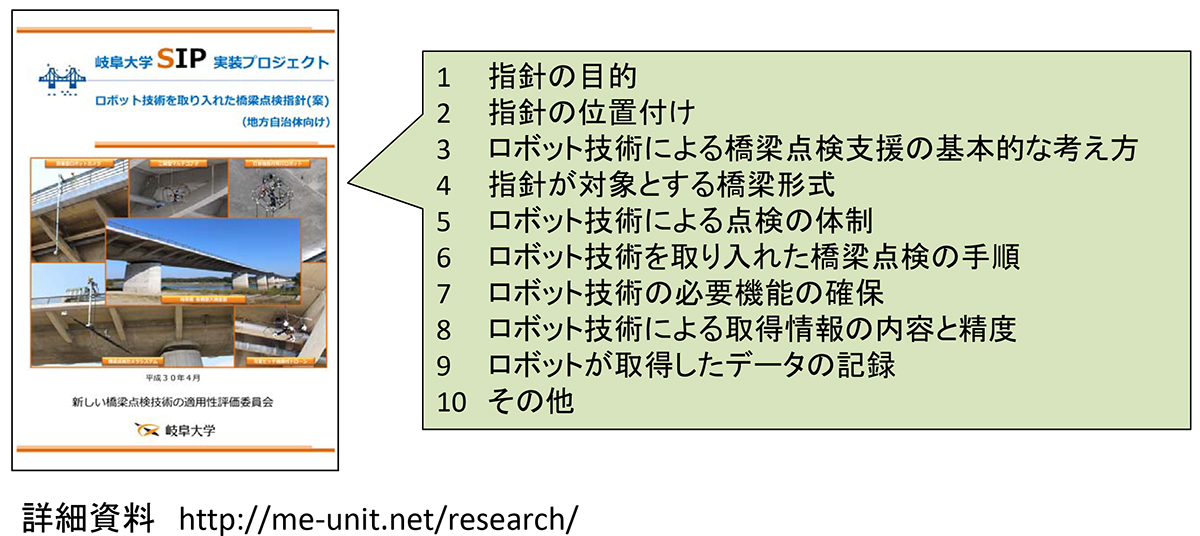
ロボット技術を取り入れた橋梁点検指針(案)
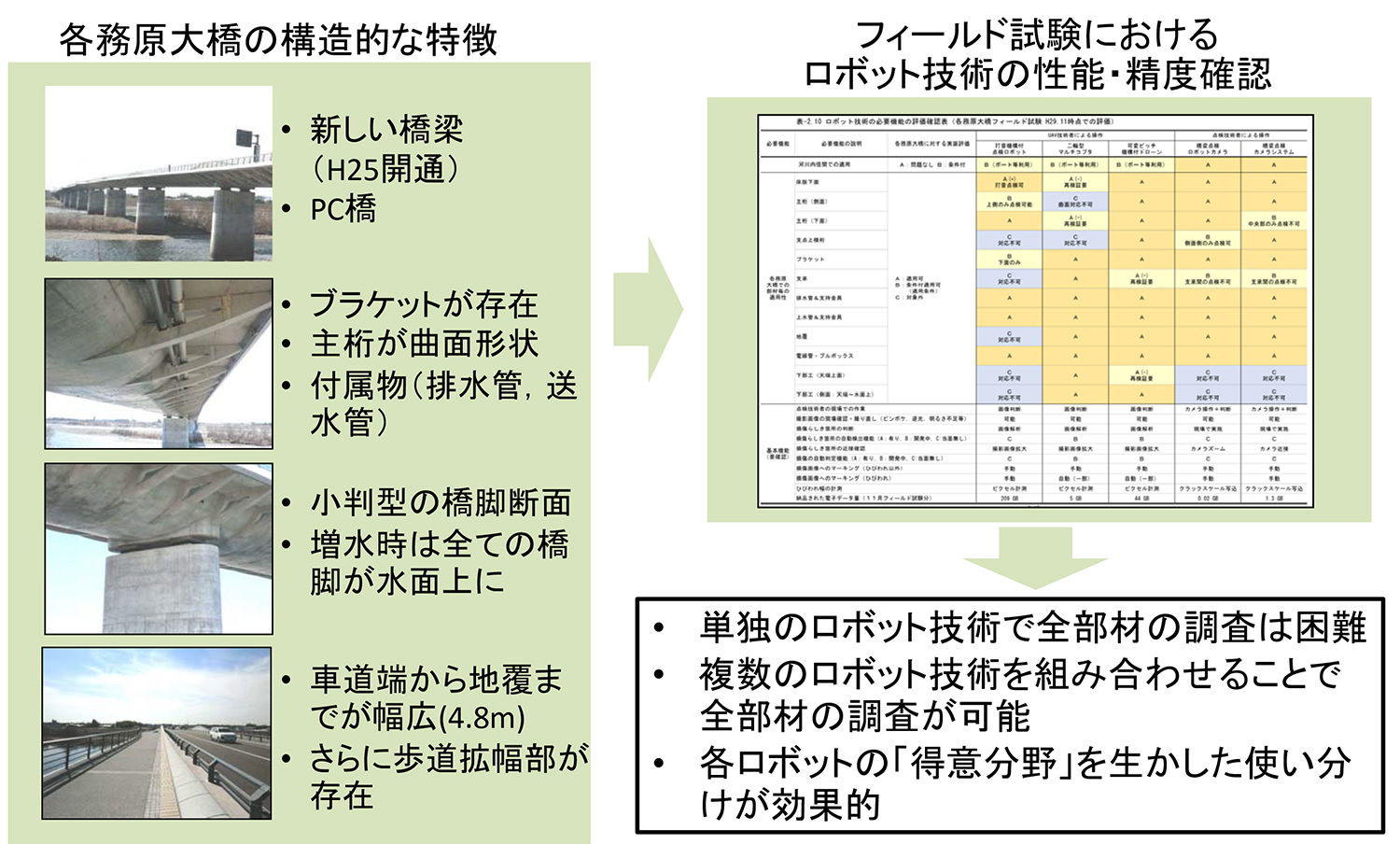
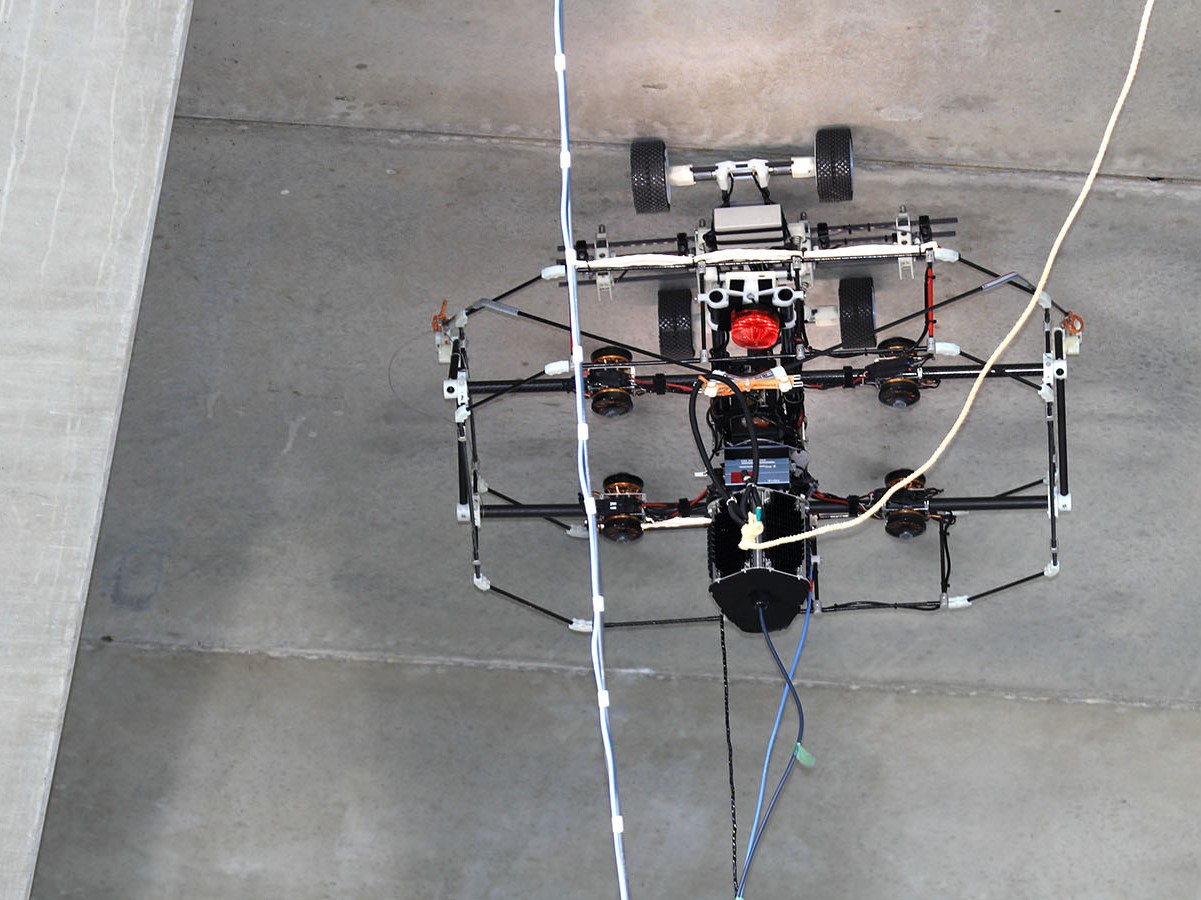
点検対象部位は同橋の桁下および支承、下部工のコンクリートとしました。これらの変状を富士通と名古屋工業大学が開発した二輪型マルチコプタ、デンソーが開発した可変ピッチ機能付きドローン(以上ドローン系)、三井住友建設と日立産業制御ソリューションズが開発した橋梁点検ロボットカメラ、ジビル調査設計が開発した橋梁点検カメラシステム(以上ロボットカメラ系)、新日本非破壊検査が開発した打音機能付き飛行ロボット、日本電気が開発した打音点検飛行ロボット(以上打音点検ロボット)で撮影、計測および打音点検しました。その後、大型橋梁点検車「AB1400X」や特殊高所技術による近接目視および打音点検も行い、ロボットによる計測の正確性についても確認しました。
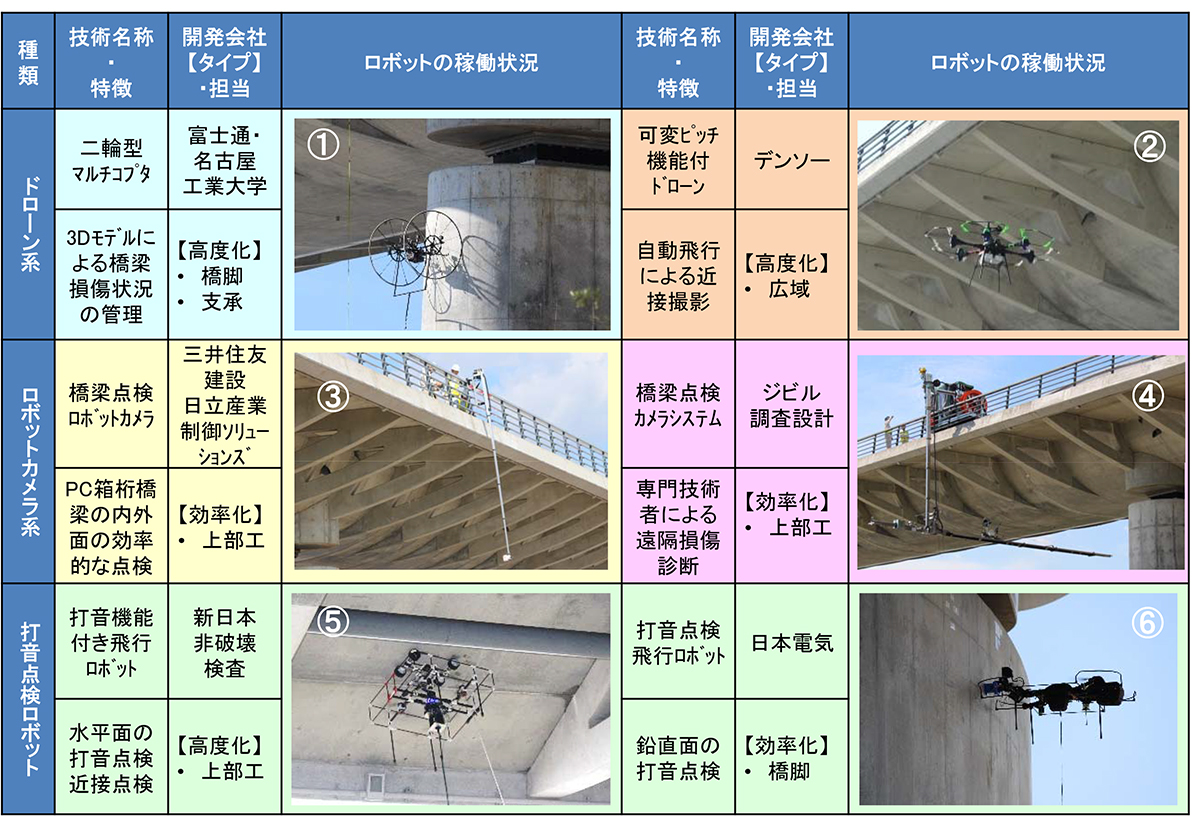
6種類のロボット点検技術
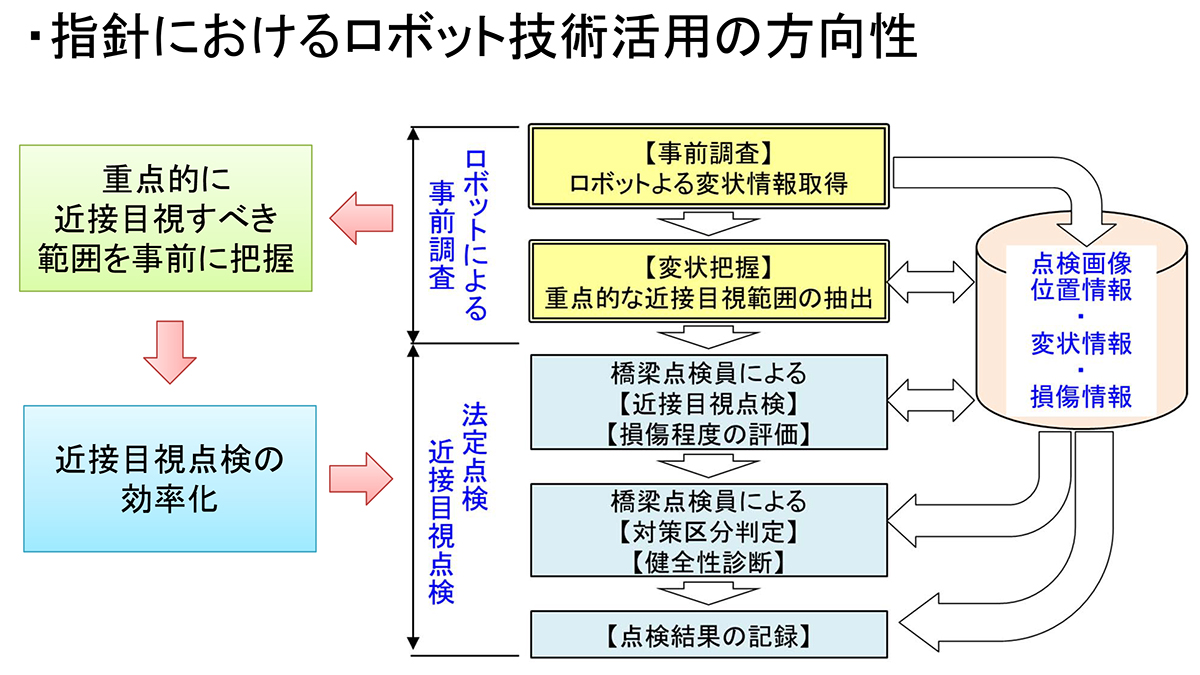
指針におけるロボット技術課長の方向性
調査方法としては、各ロボット技術の特徴を生かすために広域調査と狭域調査の2種類の手法を試行しました。広域調査(ドローン系)では広い視野での写真撮影ができ、迅速な調査や3Dモデリング、オルソ写真による損傷状況把握ができますが、その反面、今のところひび割れは幅0.3mm以上しか識別できません。一方で狭域調査(主にロボットカメラ系)は部材に近接して狭い視野で撮影するため0.2mm以上の細かなひび割れを計測できますが、現場調査に時間がかかり膨大なデータ処理が必要となるなどのデメリットがあります。支承の点検についても小型の2輪型マルチコプタを使った接写による点検を行っています。各務原大橋では検出ひび割れ幅は0.2mm幅までで良いという事を検討委員会で規定していただきました。


ドローン系(左)富士通、(右)デンソー


ロボットカメラ系(左)三井住友建設、(右)ジビル調査設計

打音点検系(左)新日本非破壊検査、(右)NEC
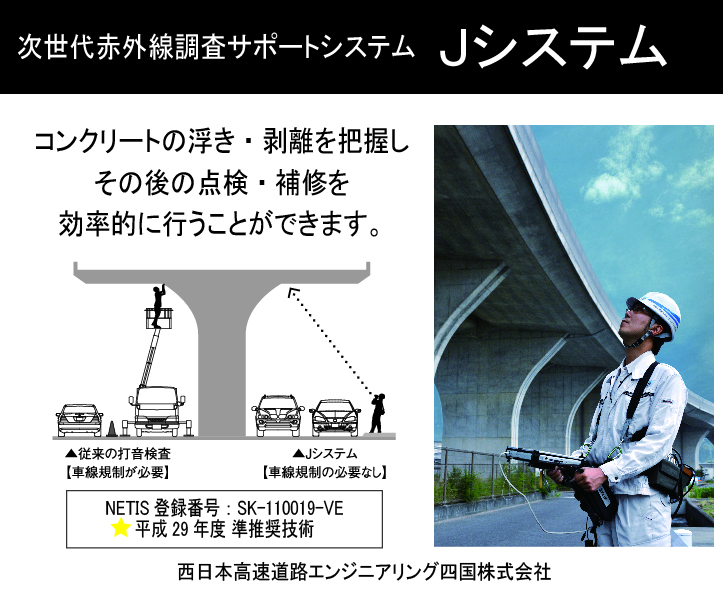
上部工については、ロボットカメラ系を用いたサーモグラフィ調査やロボットによる近接点検によって浮きの疑いがあると判断された部分を、新日本非破壊検査の打音検査で確認しました。この方法は、打音によって音の波形スペクトルを抽出し、異常を診断するものです。下部工については日本電気の開発した打音点検飛行ロボットによって取得した音を聞いて、浮きがあるかどうかを判断しました。
また、点検結果は3次元画像データや、詳細な変状マップに位置データを与えた状態で結果を取りまとめる(2D変状図(オルソ画像背景+詳細画像の紐付け、または3Dモデル(形状のみ)+変状マップ+詳細画像の紐付け))ことができるため、解析時には従来よりも飛躍的にデータを理解しやすくなっています。
次いで点検車や特殊高所技術を用いて、健全性区分がⅡ以上の変状箇所(0.3mm以上のひび割れ発生個所等)と主桁側面のひび割れ(0.3mm未満)密集発生箇所、浮き剥離が疑われる個所および主桁中央部などロボット点検が困難な個所について定期点検を行いました。近接目視結果では、蜘蛛の巣やノロなどをロボット調査において拾ってしまう例があることや、画像補正のためひび割れ幅をより大きく検出する傾向があることなどが分かりました。但しひび割れの見落としはほとんどなく精度が高いことも分かりました。今後は、データ量が膨大なものになるため、取得映像から変状を自動検出して技術者による判断を支援できるような効率的な検出機能の追加を考える必要があります。


点検車や特殊高所技術