

浜名大橋現場ルポ
橋梁維持管理点検ロボットを現場検証
国土交通省は10月28日に浜名湖河口に架かる国道1号浜名バイパスの浜名大橋において維持管理用途における次世代社会インフラ用ロボットの現場検証試験を行った。今回の現場検証技術に求める能力はコンクリート橋およびコンクリート床版における近接目視の代替・支援で、三井住友建設、三信建材工業、ルーチェサーチ、東日本高速道路、アスコ、富士建の6社が参加した(内容は下記表参照)。三井住友建設とルーチェサーチの技術の一部以外はすべて小型無人ヘリを使った技術であったが、現場は15㍍を超える強風が吹き荒れ、飛行を断念する技術もあった。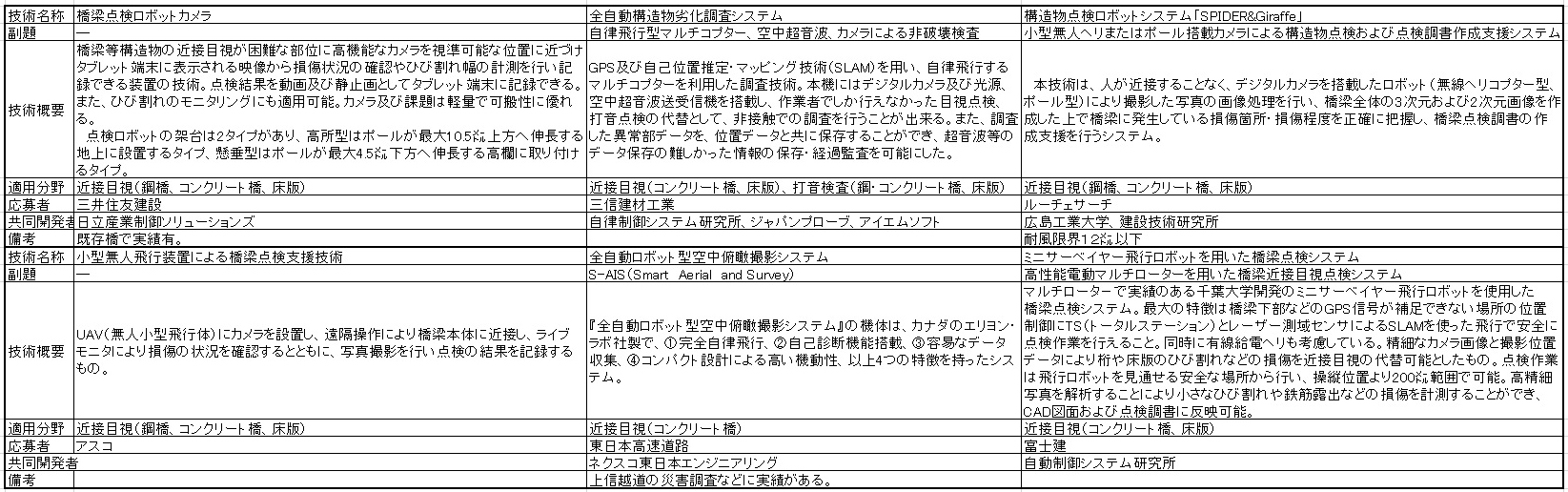
三井住友建設の技術は「橋梁点検ロボットカメラ」。日立産業制御と共同開発したもので、伸長可能なポールとその先端の雲台上にあるデジタルカメラからなる。高欄の笠木に設置する懸垂タイプと地上に置く高所型の2種類があり、懸垂型は最大4.5㍍、高所型は10.5㍍伸長する。デジタルカメラは上下方向に180度、平面方向に360度回転可能で、操作は専用のタブレット端末で行う。デジタルカメラは光学倍率30倍で20㍍先の0.2㍉幅のひび割れも確認できる。ひび割れ幅の測定は映像上に表示されるクラックスケールで行うことができ、静止画像として保存可能で、映像補正により目視性能を向上させることもできる。

最大10.5㍍伸長する(左)、デジタルカメラは上下方向に180度、平面方向に360度回転可能(右)
三信建材工業の技術は「全自動構造物劣化調査システム」。自立制御システム研究所、ジャパンプローブ、アイエムソフトと共同開発したもので、小型のヘリ(本体重量3㌔、全体重量10㌔まで搭載可能)にデジタルカメラを搭載して撮影した画像を解析して診断する。GPSおよび自己位置推定・マッピング技術(SLAM)を用いているため、点検位置のデータが構造物のどの部分に当たるか属性をつけることができる。また3次元地図を作ることも可能。スムーズな情報の整理、保全、経過管理が可能になる。将来的には空中から超音波を発して浮き剥離を検査する手法も搭載する方針だ。無線の届く範囲は500㍍で、その範囲を超えるとフェールセーフモードになり自動的に無線の届く範囲内に戻る機能を有している。また、衝突を防止することを目的としたカメラやレーザー測距機を搭載しており、桁に接近し過ぎないよう自立して飛ぶことが可能。万一激突しても構造物、ヘリが互いに損傷しないように炭素繊維強化プラスチック製のガードで側面を覆っている。飛行可能な最大風速は8㍍以内。

全自動構造物劣化調査システム
ルーチェサーチの技術は「構造物点検ロボットシステム「SPIDER&Giraffe(ジラフ)」」。広島工業大学、建設技術研究所と共同開発したもので、既に200橋弱の現場で実績を有しており、橋以外では首相官邸の業務でも用いられている。コストを縮減するため、開放的な個所はデジタルカメラを搭載した小型ヘリ「SPAIDER」を飛ばして、支承部などの狭隘な個所、複雑な個所については最大10㍍の高さまで伸ばすことのできるポールの先端に搭載したデジタルカメラ「Giraffe」によりそれぞれ連続撮影する。撮影画像を処理して橋梁全体の3次元画像や2次元画像を作ることができるが、自己位置推定はしていないため、基本的には画像の処理段階でオーバーラップ(写真画像の継ぎ目を重ねる)させて制作する。

ルーチェサーチの小型ヘリ「SPIDER」
東日本高速道路の技術は「全自動ロボット型空中俯瞰撮影システム」でネクスコ東日本エンジニアリングと共同開発した。撮影に使用している小型ヘリコプターはカナダのエリヨン・ラボ社製のもので1.2㌔と小型かつ軽量で持ち運びができ、現場で簡単に組み立てることができる。元々は軍事用途に用いられたものを活用しており、既に上信越道の災害現場などで実績を有している。
1.2㌔と軽量。元々は軍事用
アスコの技術は「小型無人飛行装置による橋梁点検支援技術」。同社は建設コンサルタントで多くの現場で橋梁点検の実績がある。同社の小型ヘリは安全性をより重視し、本体とプロペラをFRP製のガードで守っていることが特徴。衝突した際に構造物やヘリを傷めないための施策で、反面、風の影響を受けやすく、ある程度凪の状態でないと飛行させることができない。
カメラは上下両方に搭載することができ、災害時には下向きに搭載するが、橋梁点検に特化するため、今回は上向きに固定している。また今までの実務経験から桁下は光量が足りず、撮影した画像が診断ソフトに必要な精度を満たさないケースもあったことから、LED照明を搭載し、かつシャッタースピードも250分の1を確保するようにしている。GPSは搭載されているが、桁裏は機能が限定されるためマニュアルで飛ばす。そのため300時間のカリキュラムをこなした技術者を現場に投入する。現場はヘリを操縦する間と写真を撮影する人間に分け、ライブモニタを見ながら損傷の状況を確認し、写真撮影を行う。撮影した画像は解析ソフトによりオーバーラップ処理した上で、橋梁全体の画像として再編集し、損傷個所が橋梁のどの部分に当たるかを確認することができる。全体重量はカメラなどを含めても3㌔未満と軽量。
安全を最優先。しかし重量は3㌔未満と軽量
富士建の技術は「ミニサーベイヤー飛行ロボットを用いた橋梁点検システム」で自動制御システム研究所と共同開発した。最大の特徴は橋梁下部やトンネルなどのGPS信号が捕捉できない場所での飛行ロボットの位置制御にトータルステーション(TS)とレーザー測域センサによるSLAMを用いることで安全に飛行して点検作業を行えること。具体的にはトータルステーションから出るレーザーを飛行ロボットに付けているプリズムに反射させて、反射した光をトータルステーションが受けることによりトータルステーションからの距離、方位、迎角を数㍉程度の誤差で正確に測定できるため3次元の位置座標を正確に把握できる。画像は2秒おきに1000万画素以上の解像度で(静止画像を)自動撮影して行き、最後に40%以上をオーバーラップさせてつなぎ合わせて橋梁全体の画像および損傷個所が橋梁のどの部分に当たるかを確認することができる。

トータルステーションを使い3次元の位置座標を正確に把握できる
飛行ロボット
委員を務める油田信一芝浦工業大学特任教授は「確実な点検ができる画像が撮れさえすればヘリが多少きちんと飛ばなくても良いわけで、全体システムとしての完成度を上げていく必要がある」と概括した。